


0.1、索引
https://waterflow.link/articles/1666339004798
1、map 的结构
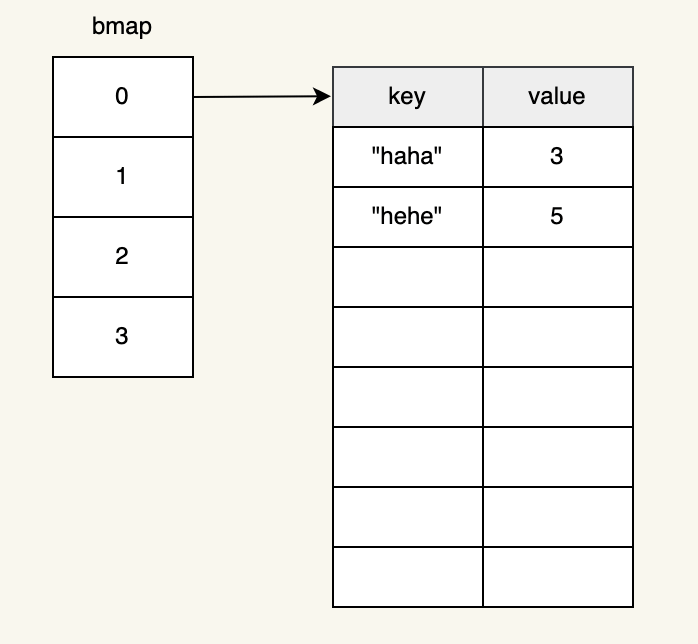
map 提供了键值对的无序集合,所有的键都是不重复的。在 go 中 map 是基于 bmap 数据结构的。在内部 hash 表是一个桶数组,每个桶是一个指向键值对数组的指针。每个桶里面可以保存 8 个元素。我们可以简化成下面的结构。
如果我们继续插入一个元素,hash 键返回相同的索引,则另一个元素也会插入相同的桶中。
如果正常桶中的元素已满,还有元素继续往相同的索引插入的话,go 会创建另一个包含 8 个元素的桶并将前一个桶指向他。
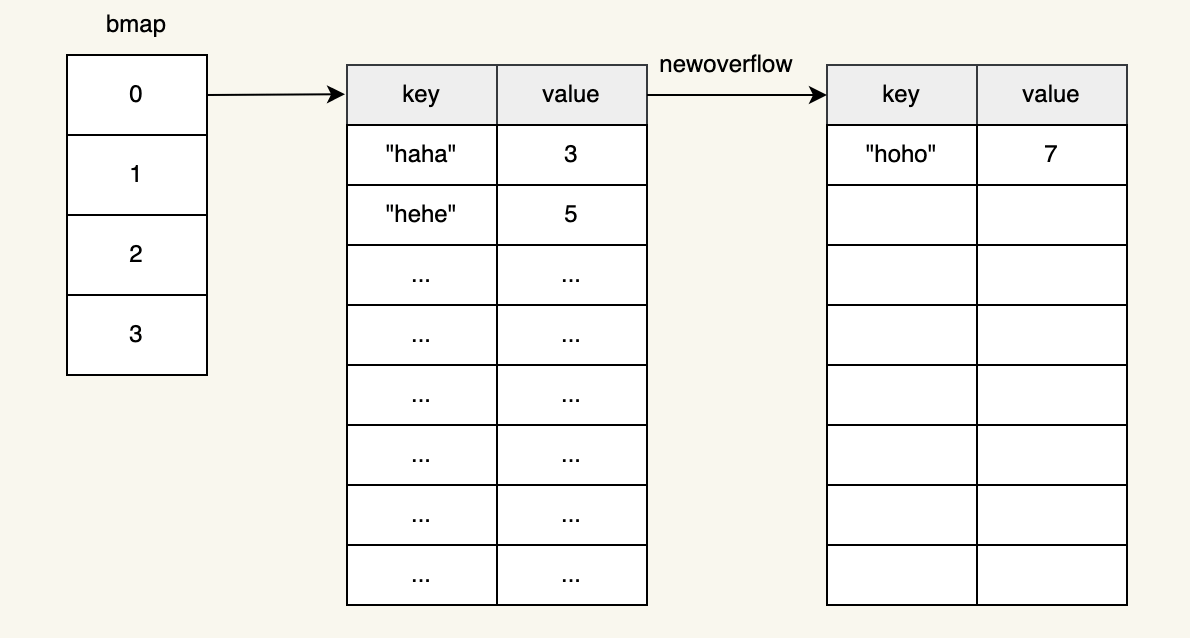
所以当我们读取、更新和删除 map 元素时,Go 必须计算相应的数组索引。 然后 Go 依次遍历所有键,直到找到提供的键。 因此,这三个操作的最坏情况时间复杂度为 O(p),其中 p 是桶中元素的总数(默认为一个桶,溢出时为多个桶)。
2、map 初始化
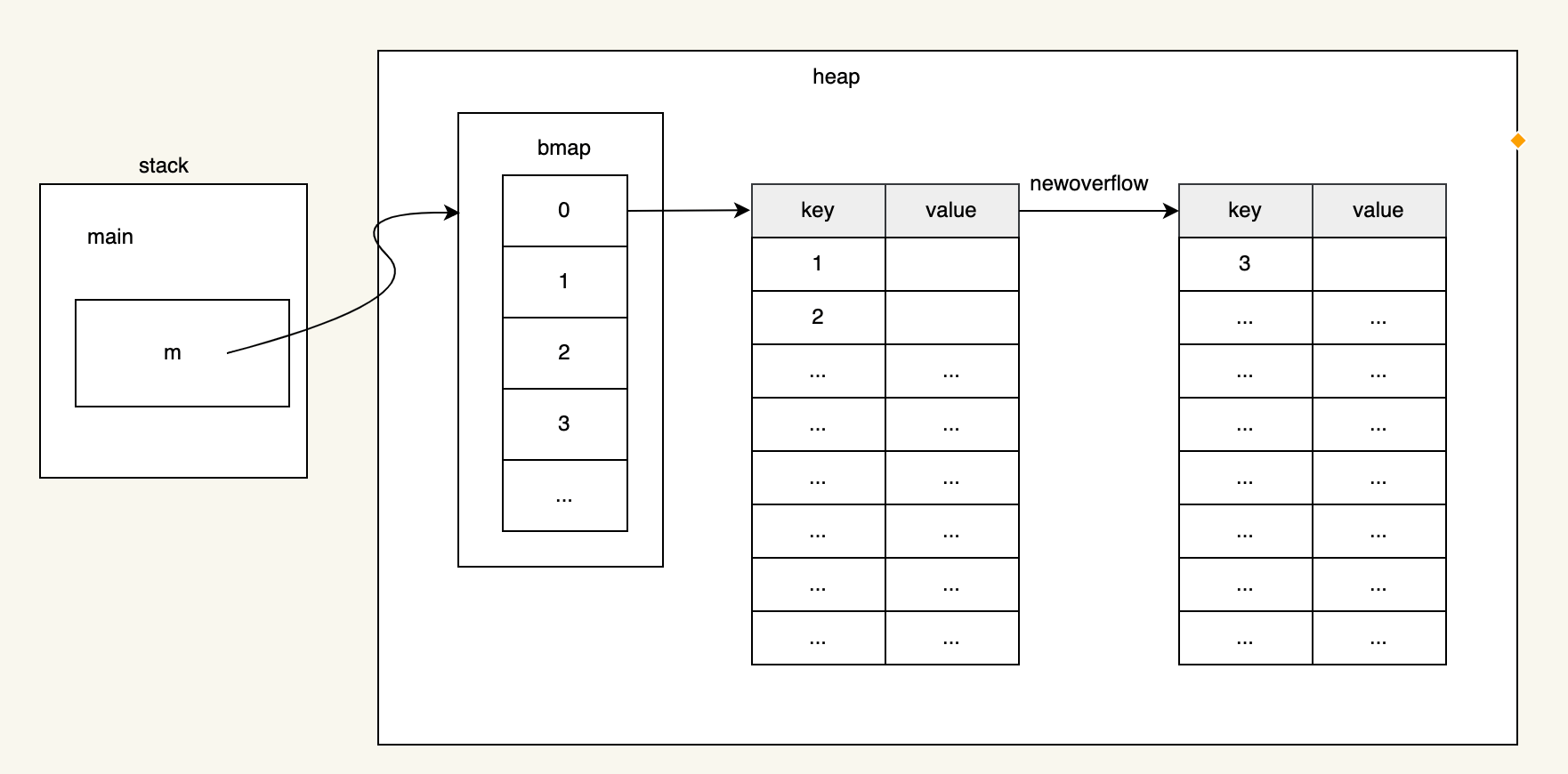
首先我们先初始化一个包含 3 个元素的 map:
m := map[string]int{
"haha": 3,
"hehe": 5,
"hoho": 7,
}
我们可能只需要遍历 2 个桶就可以找到上面的所有元素。
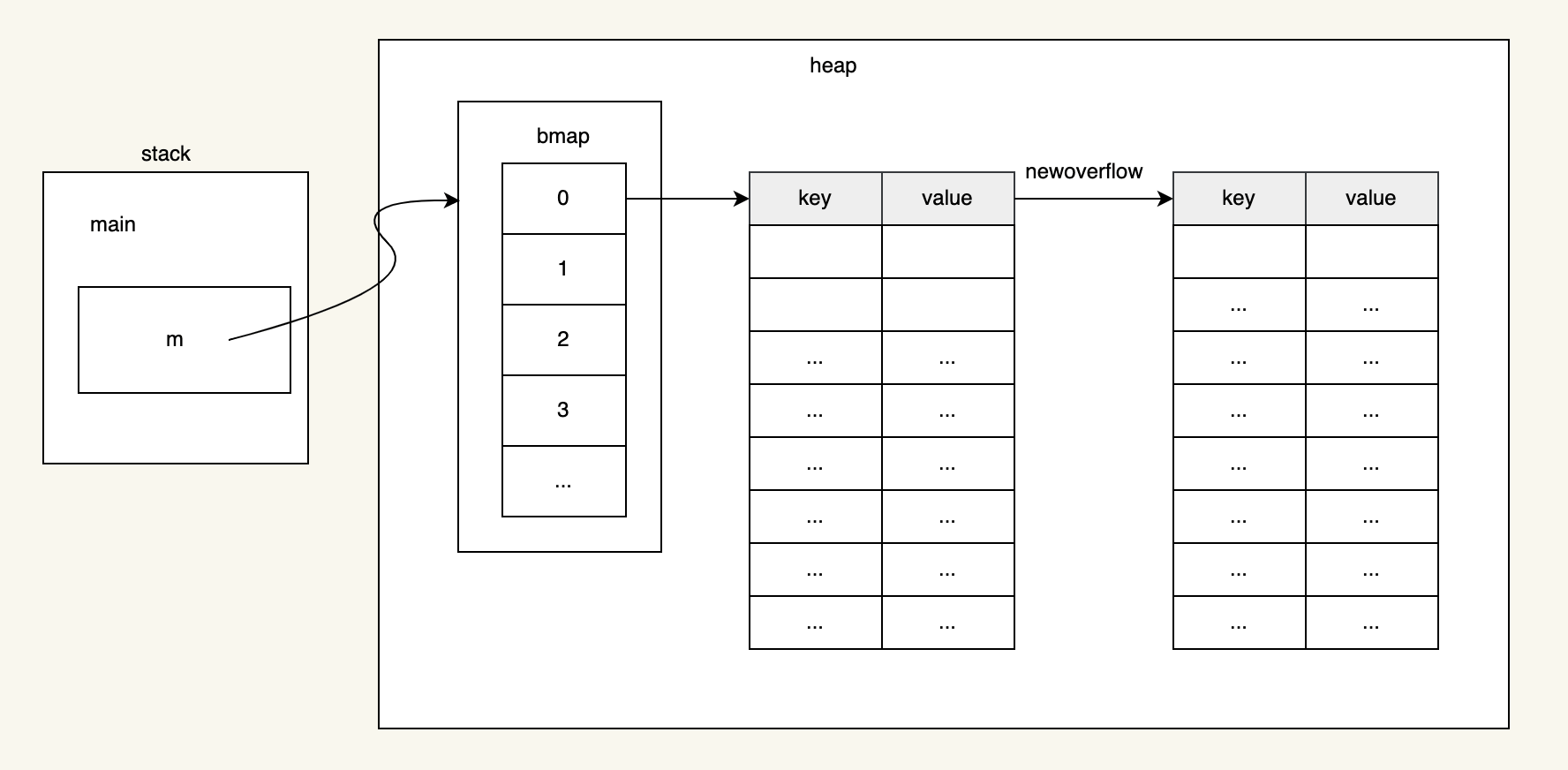
但是当我们添加 100 万个元素的时候,我们可能需要遍历上千个桶去找到指定的元素。
为了应对元素的增长,map 会选择扩容,一般是当前桶数量增加一倍。那什么时候会扩容呢?
- 负载因子大于 6.5
- 溢出桶太多
当 map 扩容的时候,所有的键都会重新分配到新的桶。所以最坏情况下,插入元素有可能是 O(n)。
我们知道,在使用切片时,如果我们预先知道要添加到切片的元素数量,我们可以用给定的大小或容量对其进行初始化。这避免了不断应对切片增长导致底层数组频繁复制的问题。map 与此类似。实际上,我们可以使用 make 内置函数在创建地图时提供初始大小。例如,如果我们要初始化一个包含 100 万个元素的 map,可以这样写:
m := make(map[string]int, 1000000)
通过指定大小,go 使用适当数量的桶创建 map 以存储 100 万个元素。 这节省了大量计算时间,因为 map 不用动态创建桶并处理桶溢出后 rehash 的问题。
指定大小 n 并不是说创建最多有 100 万个元素的 map。 我们可以继续往 map 添加元素。 这实际代表着 Go 运行时至少 需要为 n 个元素分配内存。
我们可以运行下基准测试看下这两个的性能差异:
package main
import (
"testing"
)
var n = 1000000
func BenchmarkWithSize(b *testing.B) {
for i := 0; i < b.N; i++ {
m := make(map[string]int, n)
for j := 0; j < n; j++ {
m["hhs"+string(rune(j))] = j
}
}
}
func BenchmarkWithoutSize(b *testing.B) {
for i := 0; i < b.N; i++ {
m := make(map[string]int)
for j := 0; j < n; j++ {
m["hhs"+string(rune(j))] = j
}
}
}
go test -bench=.
goos: darwin
goarch: amd64
pkg: go-demo/5
cpu: Intel(R) Core(TM) i7-4770HQ CPU @ 2.20GHz
BenchmarkWithSize-8 6 178365104 ns/op
BenchmarkWithoutSize-8 3 362949513 ns/op
PASS
ok go-demo/5 4.563s
我们可以看到初始化 map 大小的性能是高于未设置初始化大小的性能。其中的原因上面应该解释的很清楚了。
3、map 内存泄漏
我们看下下面的一个例子:
package main
import (
"fmt"
"runtime"
)
func main() {
n := 1000000
m := make(map[int]struct{})
printAlloc()
for i := 0; i < n; i++ {
m[i] = struct{}{}
}
printAlloc()
for i := 0; i < n; i++ {
delete(m, i)
}
runtime.GC()
printAlloc()
// 保留对m的引用,确保map不会被回收
runtime.KeepAlive(m)
}
// 打印内存分配情况
func printAlloc() {
var m runtime.MemStats
runtime.ReadMemStats(&m)
fmt.Printf("%d MB\n", m.Alloc/1024/1024)
}
- 首先我们初始化一个 map,map 的值为空结构体,打印分配堆内存的大小。
- 接着我们往 map 中添加 100 万个元素,打印分配堆内存的大小。
- 然后我们删除所有元素,运行垃圾回收,打印分配堆内存的大小。
我们运行下上面的代码:
go run 5.go
0 MB
33 MB
21 MB
当我们添加 100 万元素之后,堆里面会分配 33M 的数据,像下面这样
当我们删除 100 万的数据之后,触发 GC 回收,实际上 GC 只是回收了桶里面的元素数据,桶的数量不会因为删除操作而减少,所以还有 21M 的数据
原因是 map 中的桶数不会缩小。
当然,为了解决大量写入、删除造成的内存泄漏问题,map 引入了 sameSizeGrow 这一机制,在出现较多溢出桶时会整理哈希的内存减少空间的占用。